Add and Configure a Servo Drive
Add the Drive
-
 ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs node to open the menu
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs node to open the menu - Select the Add Kollmorgen Device command
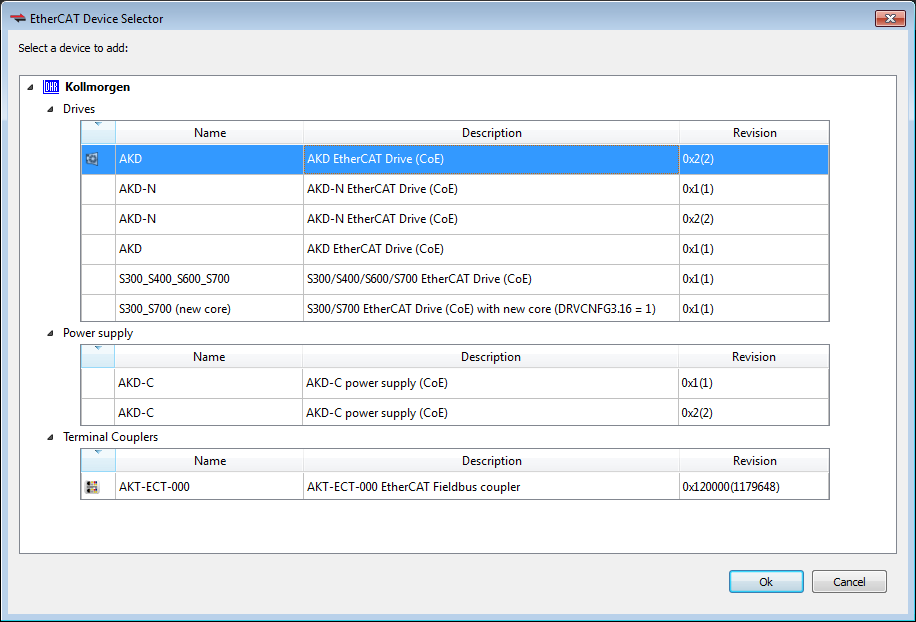
(this option is only enabled when you are not connected to the controller) - Select the specific device to add.

- When choosing an AKD be sure to select the newest revision. Older revisions may show in the list of options, but they may not be feature complete. If one of these drives is selected, only the General Properties tab will be available.
- Click Ok when you are done (for more details about the AKD drive GUI "Graphical User Interface"
A GUI is a type of user interface which allows people to interact with a computer and computer-controlled devices, click here)
- In the Project Explorer, right-click the device node and select the Rename command
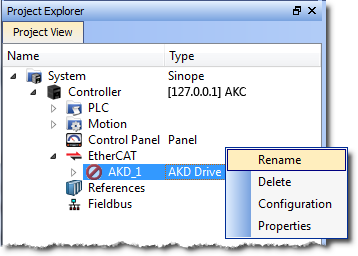
- Define the name for the new device
Note that the name is limited to 10 characters and can only include letters, numbers, and underscores.
- Click OK
-
-
An alternative method to add a drive is to rely on the auto scan feature.
When an AKD drive is added to the project tree, it must be mapped to a physical drive. This step is explained in Add & Configure Third Party Devices.






